Come costruire e posizionare la centralina di volo sul quadricottero
Lo schema elettrico ci permette di capire come sono collegati tra loro i diversi elementi elettronici. Nella pratica dobbiamo usare le nostre manualità per costruire il circuito in maniera corretta e ordinata.
Nell’elenco seguente trovate il riepilogo dei materiali presenti nello schema elettrico che ho usato per costruire la scheda di volo:
- Arduino Mini (Acquistabile ovunque nel mondo!)
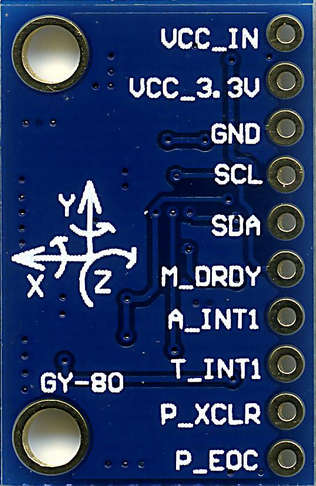
- IMU GY80 (Acquistabile su Ebay)
- Regolatore di tensione LM7805
- Fili, connettori e stagno
- Led rosso da 3mm
- Resistenza da 330 ohm e da 4.7Kohm
- Condensatori elettrolitici da 100uF
- Condensatori poliestere sa 100nF
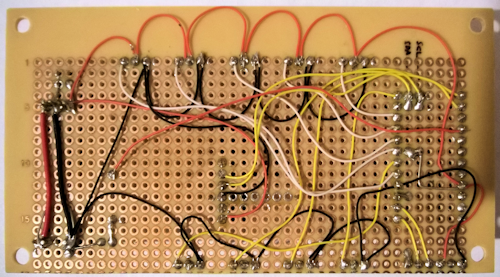
Come supporto per montare i componenti ho usato una basetta mille fori. I collegamenti sono stati realizzati usando filo da 1 mm per la sezione di alimentazione e filo da 0.25 mm per il collegamento dei componenti elettronici.

La disposizione dei componenti nella basetta mille fori può essere fatta a piacimento tranne che per la IMU GY80 che deve essere montata al centro del circuito, coincidente col centro del quadricottero. Anche il verso della IMU deve coincidere con il lato del quadricottero che riconosciamo come parte frontale. Per orientare la IMU è sufficiente controllare il disegno stampato nella parte inferiore del pcb, attraverso delle frecce viene indicato il verso dei tre assi X, Y e Z. Dovremmo orientare la IMU secondo l’asse delle ordinate (Y), il verso stabilisce la parte anteriore del quadricottero.
Una volta realizzata la centralina dobbiamo collegarla meccanicamente al telaio del quadricottero. Possiamo usare delle torrette in plastica o dei distanziali filetati. La scheda è sottoposta a vibrazioni e a possibili urti quindi è consigliabile assicurarsi che il suo collegamento sia ben saldo al telaio del quadricottero.
Infine procediamo al collegamento dei cavi di controllo degli ESC e dei canali del telecomando.

Tutto è pronto per procede all’installazione e configurazione di MultiWii.
Salve, sarebbe interessante poter vedere anche i collegamenti fatti sotto la scheda di controllo, ovviamente se possibile.
In ogni caso faccio anche io i miei complimenti per il suo tutorial, poichè è il più chiaro su internet, spiegando in modo preciso tutta la procedura di costruzione del quadricottero.
PS. Potrebbe gentilmente specificare quale alimentatore a scelto per le sue batterie?
Grazie in anticipo
Buona serata
Ciao Mario
ho aggiornato l’articolo con la foto dei collegamenti.
Cosa intendi per alimentatore per le batterie? Se intendi il caricabatterie ho un Turnigy Accu6, l’alimentatore che uso è un 15Vdc 6.7A.
Saluti
Marco, vorrei chiederti se è possibile capire il funzionamento della centralina che permette la discesa del carrello, e se è possibile fare un fac-simile in base all’angolazione rispetto al suolo terrestre, grazie, puoi rispondermi anche tramite mail
Salve
Intendevo sia alimentatore che batteria…grazie mille per le risposte…volevo chiedere come posso fare ad utilizzare il Turnigy accu6 con un alimentatore da 5A e 19V? Come posso abbassare la tensione?
Ciao, posso fare la stessa cosa con GY85? Sai dirmi le differenze?
Salve,
volevo chiedere un chiarimento riguardo agli articoli da comprare su Hobbyking;
bisogna selezionare la bandiera europea quando si compra giusto? Poi però su paypal il conto è comunque in dollari? e le spese di spedizione?
Grazie in anticipo
Ciao
si devi selezionare la bandiera Europea o Inglese, altrimenti di default compri dal magazzino cinese, col rischio di pagare tasse doganali. Le spese di spedizione sono intorno ai 22-25€, Il pagamento è in dollari ma PayPal esegue correttamente il cambio valuta e la transazione.
saluti
Buongiorno Marco,
incredibilmente esaustivo…
… Ero interessato all’installazione di una foto/video-camera… Hai in preparazione un tutorial dedicato?
Saluti e grazie
Oggi esistono molte action cam a prezzi sotto i 100€ che puoi installare tranquillamente sul quadricottero. Per ora non ho in preparazione un tutorial sull’installazione della action cam con gimbal, sto preparando quello per l’installazione del software multiwii, però se può interessare lo posso preparare.
a presto.
Ciao Marco,
sarebbe interessantissimo…
Grazie mille!
Buongiorno Marco,
prima di tutto volevo complimentarmi e rigraziarti con te per il chiaro e dettagliato lavoro che hai fatto e stai facendo, a mio parere infatti è migliore che si trova in tutta le rete.
Volevo chiederti una informazione: volevo pilotare il quadricottero non via radiocomando ma attraverso smartphone o tablet. E’ fattibile o c’è già qualcosa in giro da cui prendere spunto?
Ti ringrazio già in anticipo e buon lavoro
Saluti
Complimenti per l’ottima guida, io volevo realizzare lo stesso quadricottero ma usato per il trasporto della mia GOPRO, devo rivedere tutti i componenti oppure il carico è sufficiente? ( ovviamente cambierò il telaio ).
Un ultima domanda, se volessi inserire anche il GPS cosa consigli e soprattutto cosa bisogna fare?
Grazie in anticipo
Bisogna acquistare un componente che si chiama ublox (la versione 6 è più che sufficiente). Il problema è che l’interfacciamento è un po’ problematico, ma il software multiwii lo comprende (basta rendere attiva la riga relativa alla sua definizione).
Grazie Sergio per l’informazione sul GPS..cerco un po di informazioni in giro e provo a cimentarmi nell impresa!
Marco ma nel tuo schema elettrico ci sono 2 elettrolitici mentre nella disposizione componenti solo 1…che fine ha fatto l’altro?
Ciao
la schedina è un prototipo in evoluzione, in effetti ho messo solo un elettrolitico mentre nello schema ne ho inserito 2. Questo componente non è critico e quindi puoi metterne solo uno,, come nella mia scheda.
Saluti
Marco
Grazie mille
Ottimo tutorial unico incoveniente non imputabile al tutorial non riesco a scaricare multiwii & multiwii conf
Buongiorno, innanzitutto complimenti per il blog e per gli articoli estremamente utili e chiari, vorrei chiedere un pò di consigli e d’aiuto per favore…. sto cercando di realizzare un progetto abbastanza ambizioso, ma è la prima volta che metto mano su arduino e non so ancora bene come scegliere i moduli, magari se mi date anche una mano sul progetto sarei felicissimo, riuscirlo a realizzare insieme al blog sarebbe il massimo…. Ho notato che pilotando un quadricottero senza gps il problema principale è quello di capire verso dove “guarda” durante il volo, soprattutto se voliamo di giorno e non abbiamo l’aiuto dei led, In pratica vorrei creare un sistema che mi dice in remoto verso dove sta “guardando” il quadricottero in volo, e soprattutto così piccolo e flessibile da poter essere semplicemente istallato anche su quadricotteri commerciali come il Syma X5C. per fare ciò ho pensato di mettere far gestire dal un arduino mini pro (montato sul quadricottero) un modulo 9DOG (ma sfruttare solo la bussola di questo modulino) un trasmettitore da 315 MHz (alimentato da uno step un per aumentarne la portata) che manda le info ad un ricevitore che avrei io mentre sto pilotando. Il ricevitore sarebbe gestito da un arduino uno che mi riporta su un LCD la direzione verso la quale sta navigando il drone, ovviamente bisogna far acquisire lo zero della bussola con il drone a terra prima della partenza, così il riferimento degli assi sarà relativo a come sta il quadricottero rispetto a noi alla partenza, che ne pensate???
Questa sarebbe l’applicazione secondo me più utile, ma anche se più complicato avrei pensato di poter sfruttare, magari in un secondo momento, gli accelerometri del modulo 9DOG per fare un integrazione delle varie accelerazioni che subisce il quadricottero e riportarlo sul nostro LCD come un “ping” in cosante evoluzione che ci dice (più o meno) la posizione del nostro velivolo rispetto a noi, che saremmo un puntino centrale sul monitor. Che ne pensate???
Vi linko di seguito i componenti che ho scelto per questo progetto così da essere più completo:
1) http://www.ebay.it/itm/221532713661?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649
2) http://www.ebay.it/itm/321472092982?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
3) http://www.ebay.it/itm/351195043346?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
4) http://www.ebay.it/itm/281540446138?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649
5) http://www.ebay.it/itm/351239560194?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
6) http://www.ebay.it/itm/351198953361?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649
Ciao
può essere interessante se il costo rimane molto contenuto. Questo sistema ricorda un po il sistema IOC dei Dji Naza. In pratica vuoi realizzare una sorta di telemetria, prova a cercare su internet progetti simili.
buon lavoro
Marco
si, esatto, sarebbe una telemetria basic, il costo è molto contenuto, comprando tutto tutto ho speso 25 euro, ma se si possiede già un “arduino uno” si scende, la cosa che costa più è l’lcd (7 euro circa), ed il modulo 9DOG può servire in futuro per altri progetti o per implementare questo.
L’idea mi è effettivamente venuta guardando l’app del phantom DJI, in basso sulla sinistra hanno un mini “radar” che con la funzione bussola mostra l’orientazione che ha il drone….
potresti usare un display a 16 segmenti per indicare la direzione.
Il mio problema è che non ho mai programmato, qualcuno potrebbe darmi una mano a scrivere il codice??? io ho tanto impegno e tanta voglia di imparare….
ciao a tutti help me sono in fase di costruzione del quad mi manca solo la configurazione possiedo arduino uno con imu gy 80nei vari video di tutorial ho visto che il programma multiwii arduino 1.0.6 e diferente dal mio, mancano una serie di tasti per la configurazione dove mi viene chiesto che tipo di quad il modello di imu da caricare poi su arduino. grazie
Ciao Davide
leggi l’articolo
https://logicaprogrammabile.it/installare-multiwii-sulla-centralina-di-volo-del-quadricottero/
trovi la risposta alla tua domanda
saluti